神秘数字111背后是否隐藏着不为人知的秘密?一起来探寻这独特数字的奥秘
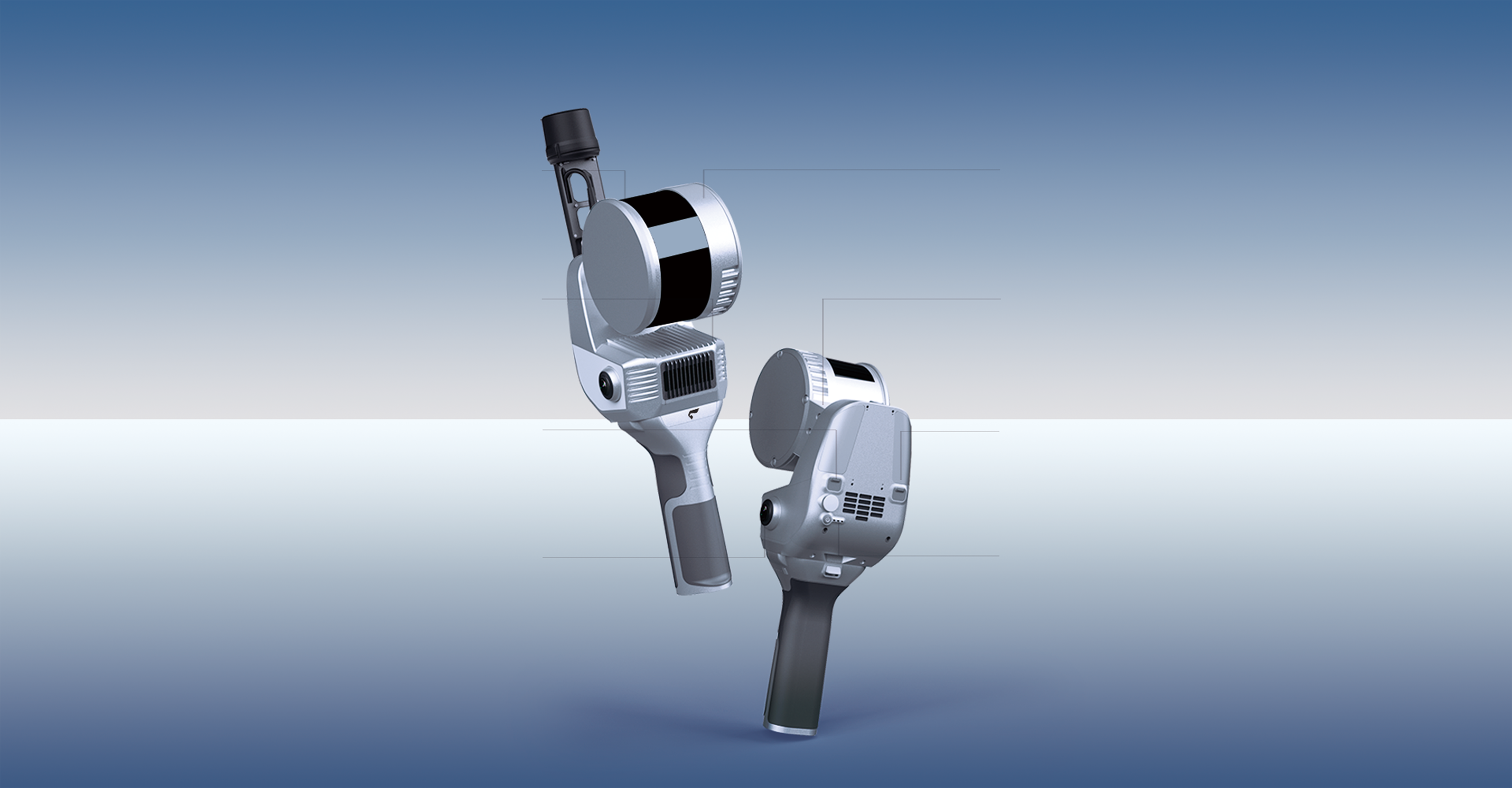
SLAM200E是飞马机器人精心研发的高精度、高性能、高效率手持激光扫描仪,融合前序SLAM100与SLAM200的各自表征产品特色。该扫描仪集成 高点频激光传感器、搭载两颗1200万像素全景相机、内置高精度卫星定位模块及高性能计算处理单元, 为用户带来空间数据获取的全新体验。
作为专业级高精度移动测量工具,SLAM200E自然承袭前代产品能力,可在无卫星导航定位下完成高精度测量成图工作, 内置高性能计算处理单元支持“边采集、边建图、边赋色”的实时空间数据成果,并可在外接RTK时实现基于绝对坐标的实时建图。此外,SLAM200E新增多项飞马自主研发的功能应用,除了支持数据断点续扫、空地点云数据融合、高实景还原3DGS,更全新同步发布SLAM Instant APP,实现测量一经完成即可实时成图, 特别适合特定行业对测量现场快速生成测量报告的需求, 大幅提升作业效率。
通用扩展支架
GNSS天线、背包、机载、车载、手机、穿戴式助力支架
内置卫星定位芯片
支持全星座(含北斗)
TYPE-C
外部电源、OTG
相机传感器
12 MP × 2
激光传感器
120m 测程,32万/64万点频[1]
旋转云台
360° × 270° 激光视场角
TYPE-C
高速数据拷贝
状态指示灯
支持无APP作业
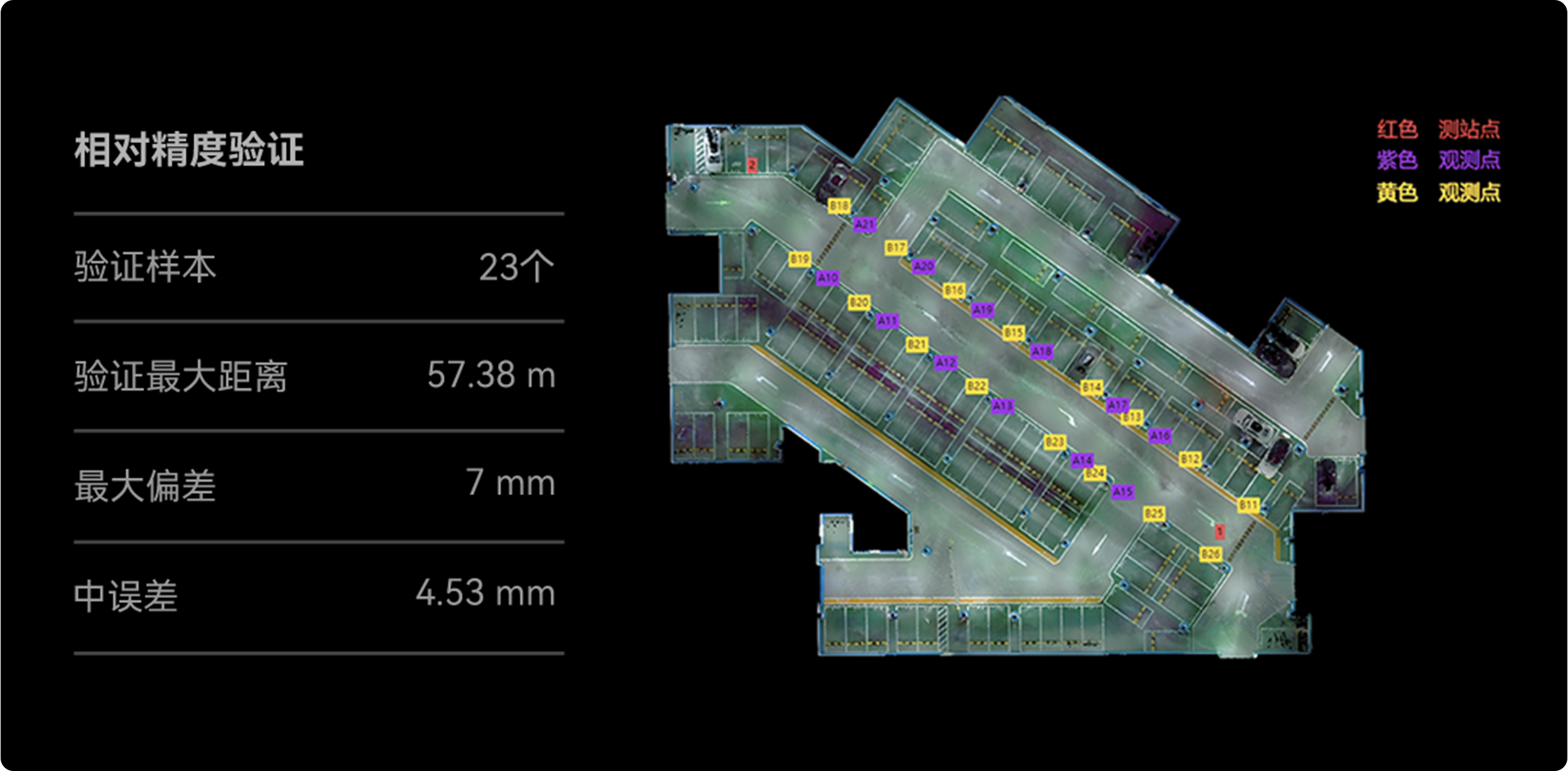
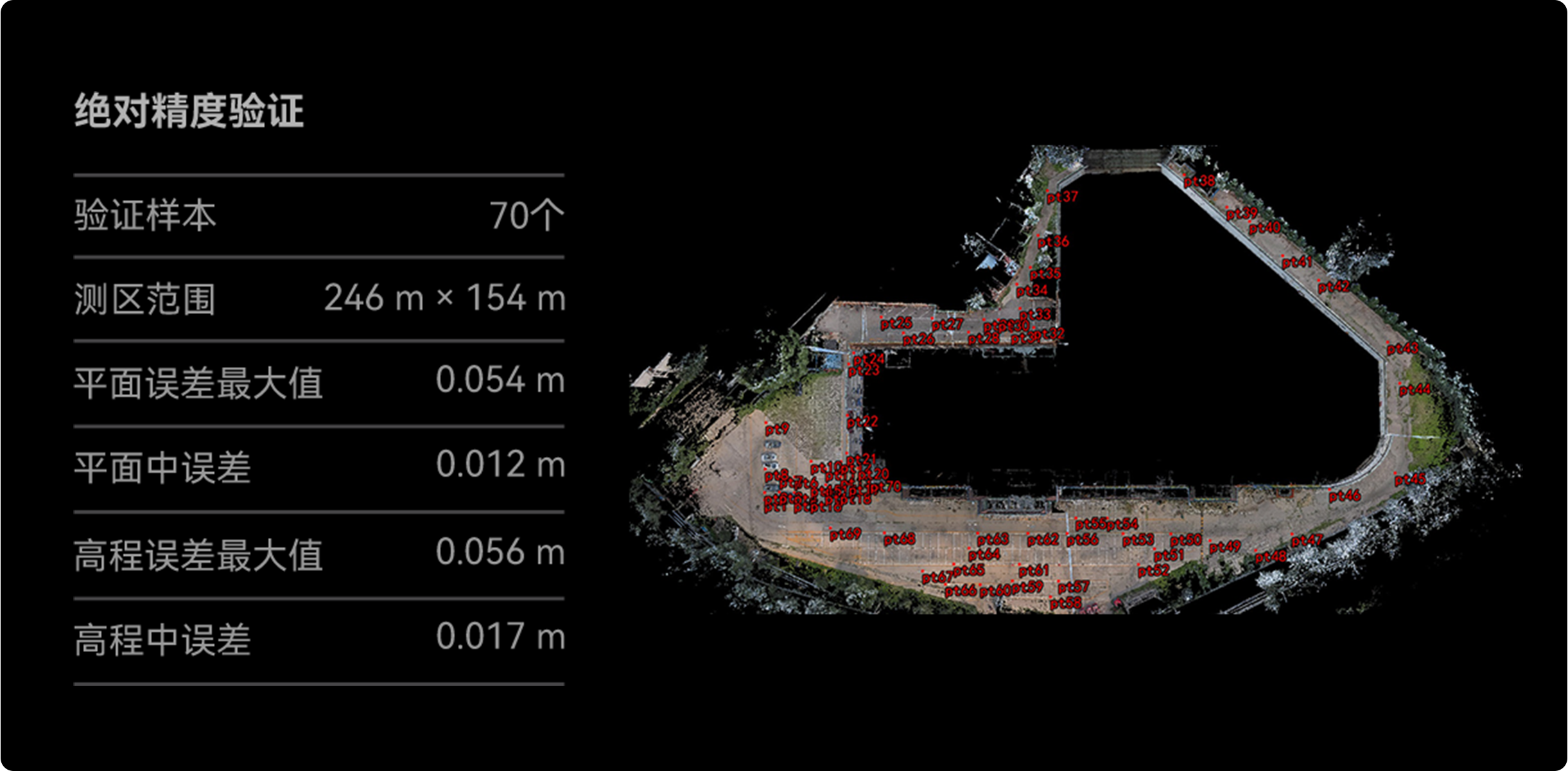
作为专业级高精度移动测量工具,SLAM200E可实现60 m 范围内5 mm 相对精度测量、100 m 范围内1 cm 相对精度测量;在连接RTK或引入控制点时,可实现绝对精度2 cm 的高精度测量。
SLAM200E即扫即绘的高精度实时彩色点云使成果展现直观且详尽。在连接RTK的前提下可直出具有绝对坐标的成果点云,大幅提升作业效率。在绝大多数典型应用场景(包括但不限于城市测绘、工程监测等领域)中均可实现实时点云获取,显著缩短内业后处理周期。
高精度点云结合高分辨率影像纹理,使得SLAM200E可以精准复刻三维场景,满足数字工厂、数字展馆、BIM等三维数据要求较高的应用场景的三维数据采集需求。
- 高密度
- 高密度
 大堂全局图
大堂全局图
两颗1200万像素的全景相机可获取360度广泛视野影像和精细的纹理信息,生成更逼真的彩色点云和全景图像。全景相机数据可用于点云赋色、视觉SLAM、全景图生成、三维建图、高斯泼溅等操作。




海量点云数据转换成最终测量成果通常需借助专业后处理软件,且要求操作人员具备专业技能并投入大量内业时间。飞马机器人的SLAM Instant APP可为多场景提供即时测量解决方案,外业实时获取点云成果后即可现场快速生成行业报告。
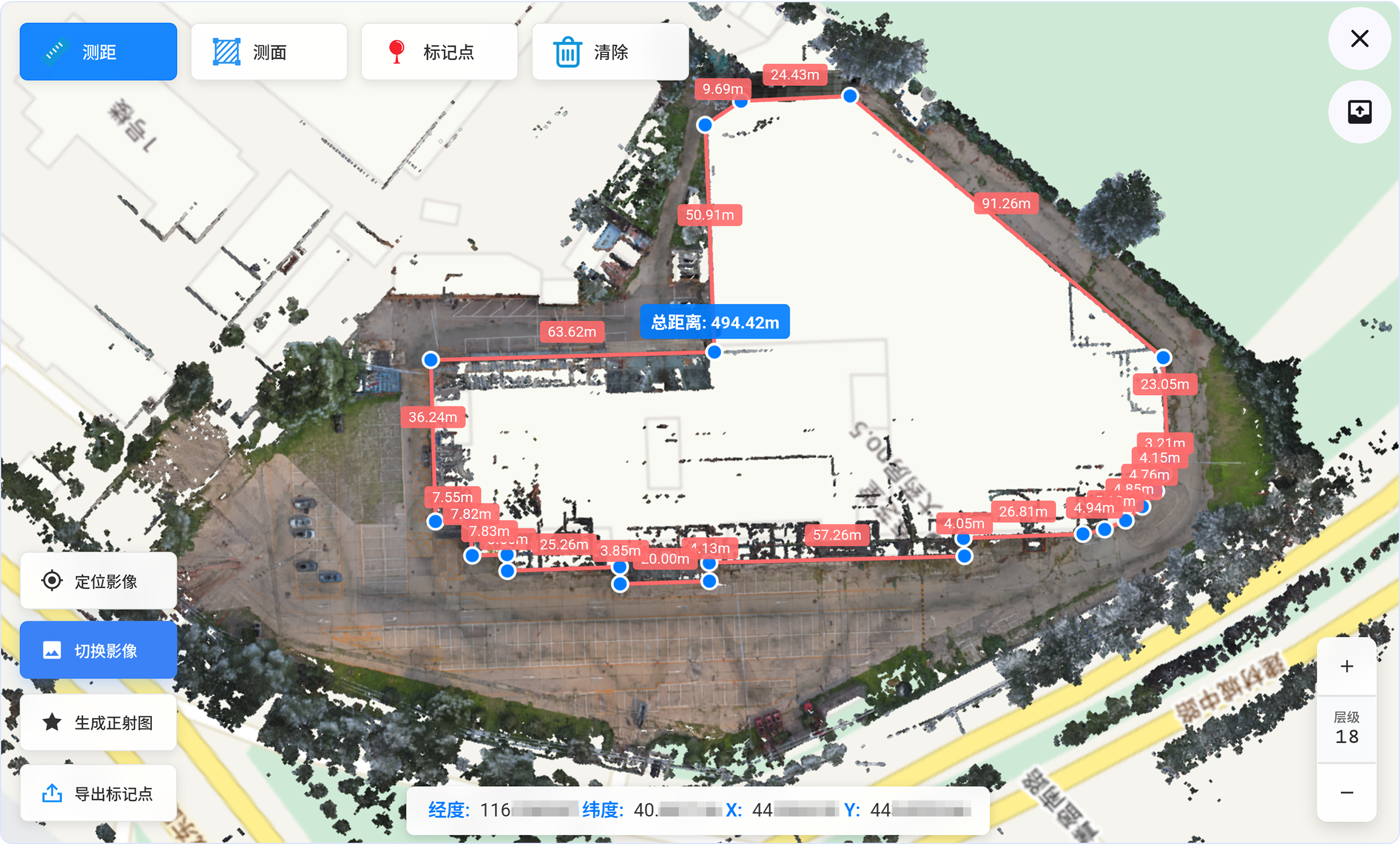 多段测量
多段测量 距离测量
距离测量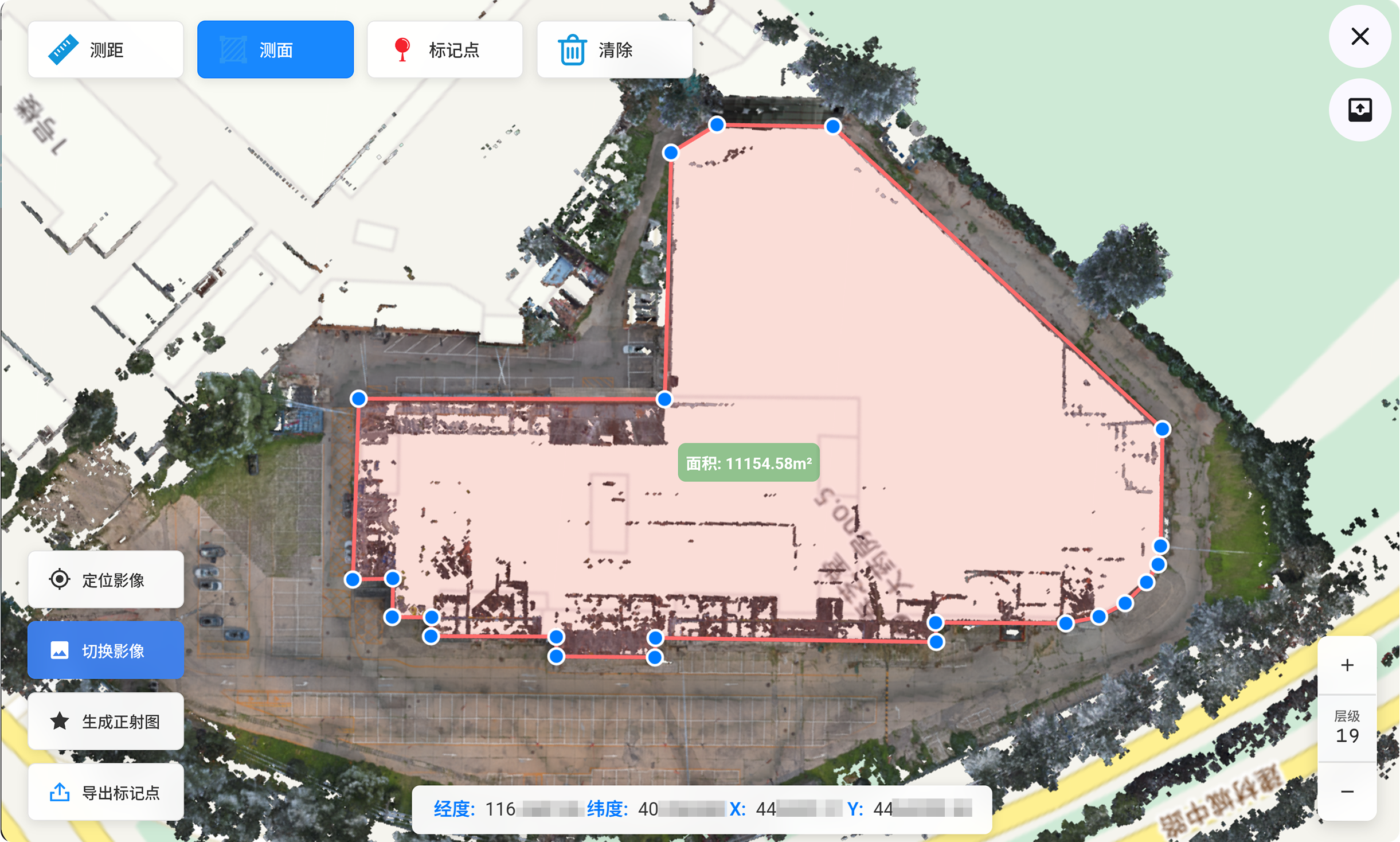 面积测量
面积测量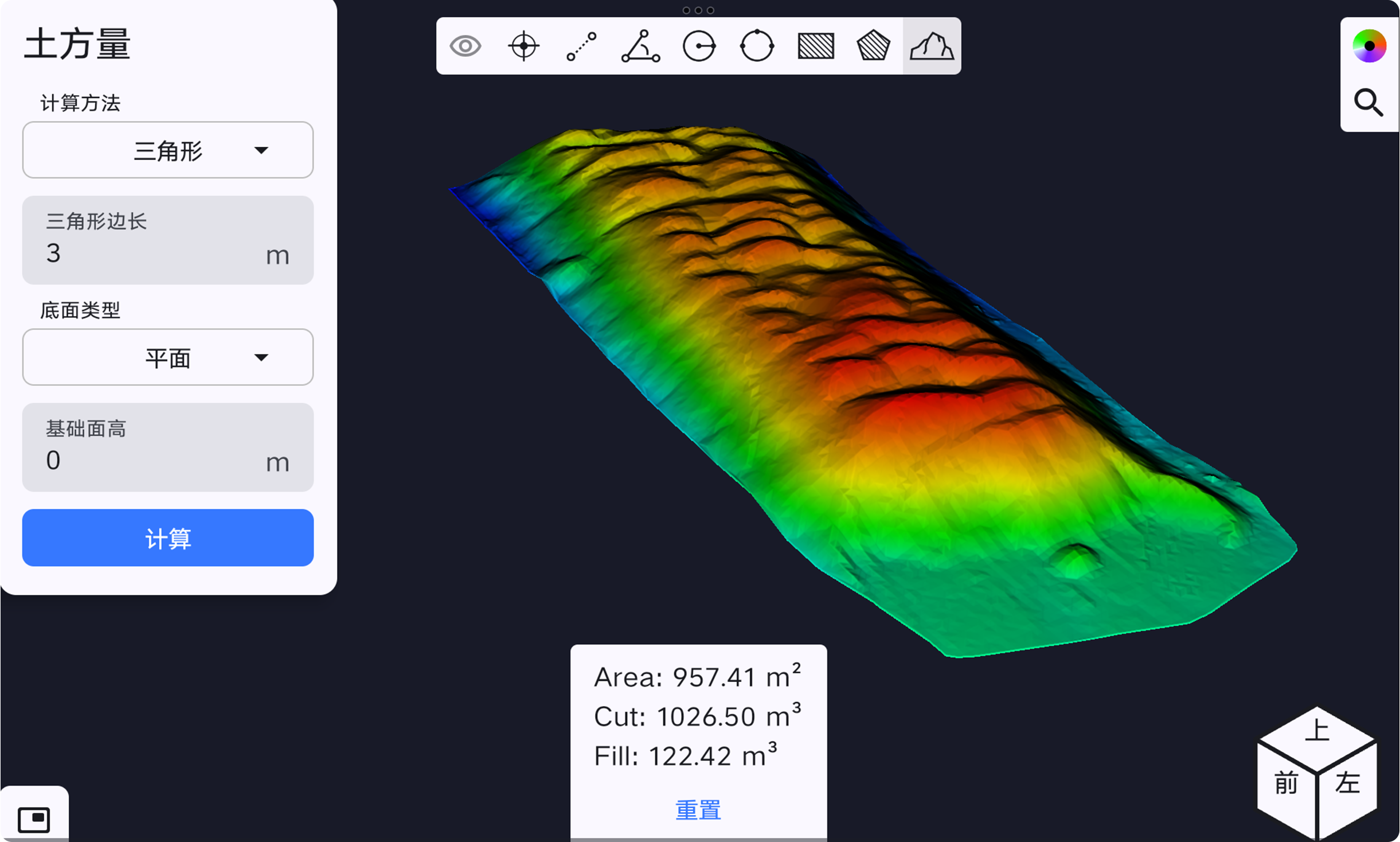 体积测量
体积测量
手持激光扫描仪可高效完成地上与地下三维数据的采集,但针对部分应用场景仍需补充空中三维点云数据。飞马机器人为用户提供基于手持激光扫描仪机载模式和手持模式的空地数据融合算法,将三维点云数据、影像数据、3DGS数据一体融合,提供空地一体化解决方案。
 21层建筑物及地下成果图
21层建筑物及地下成果图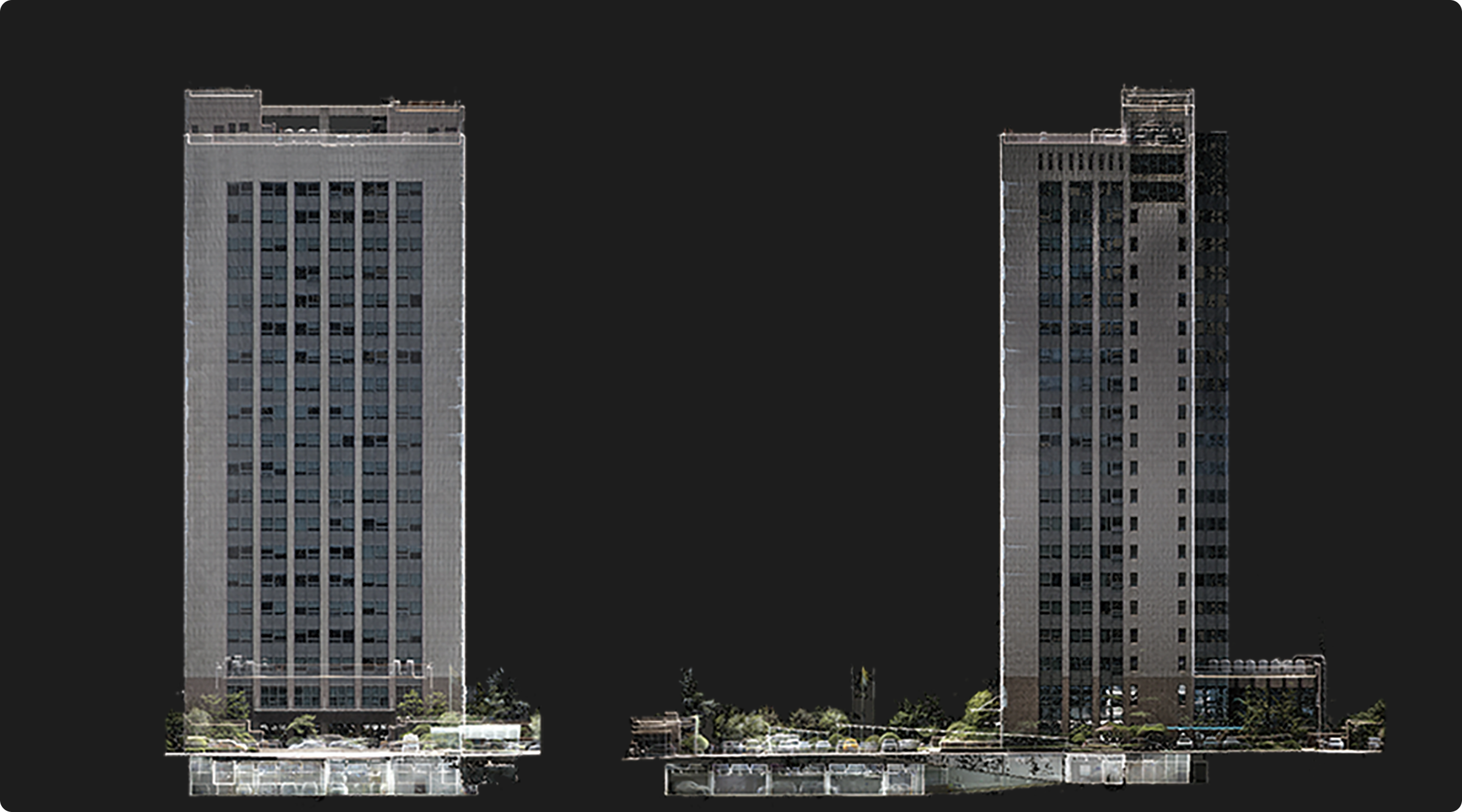 21层建筑物及地下侧视图
21层建筑物及地下侧视图
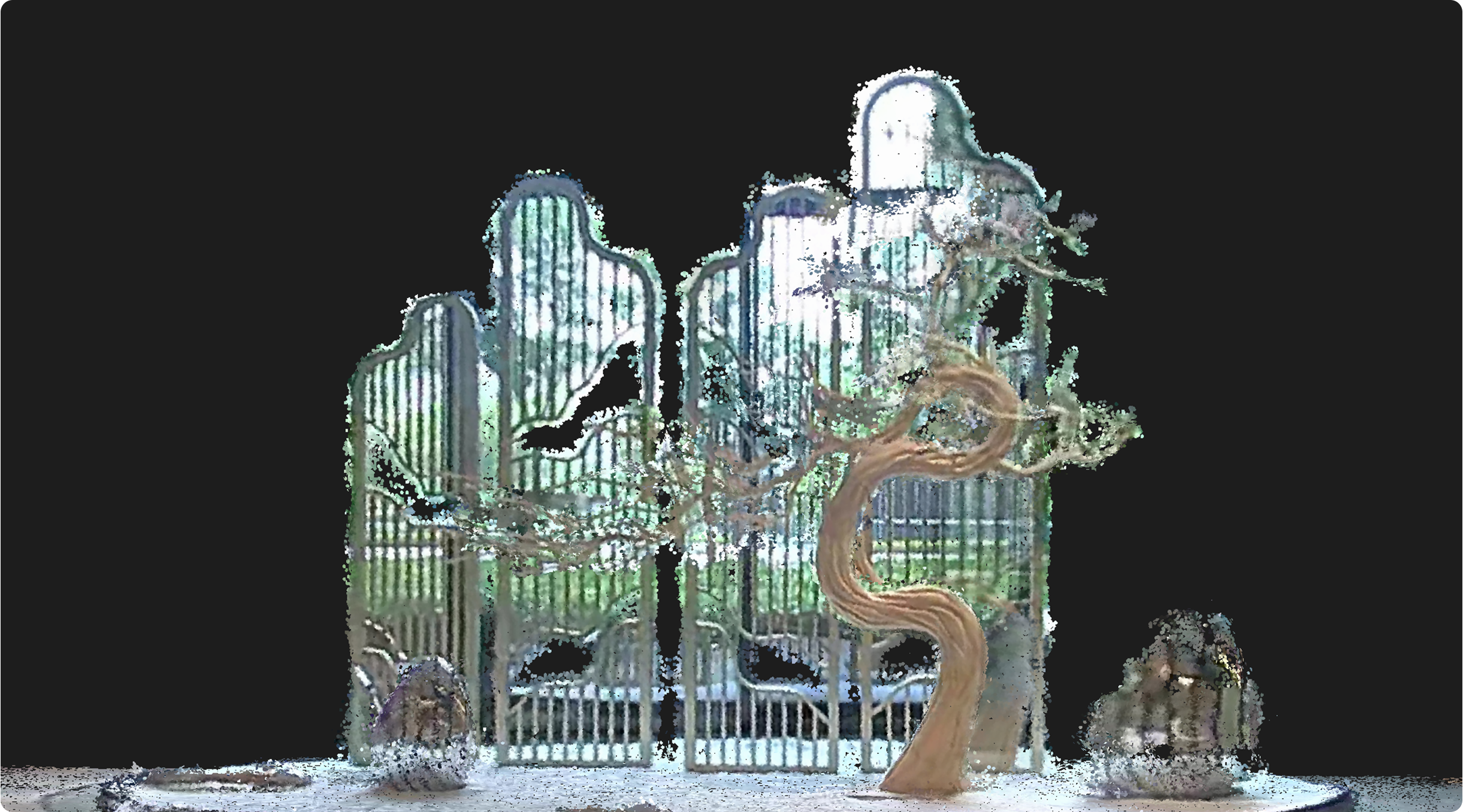
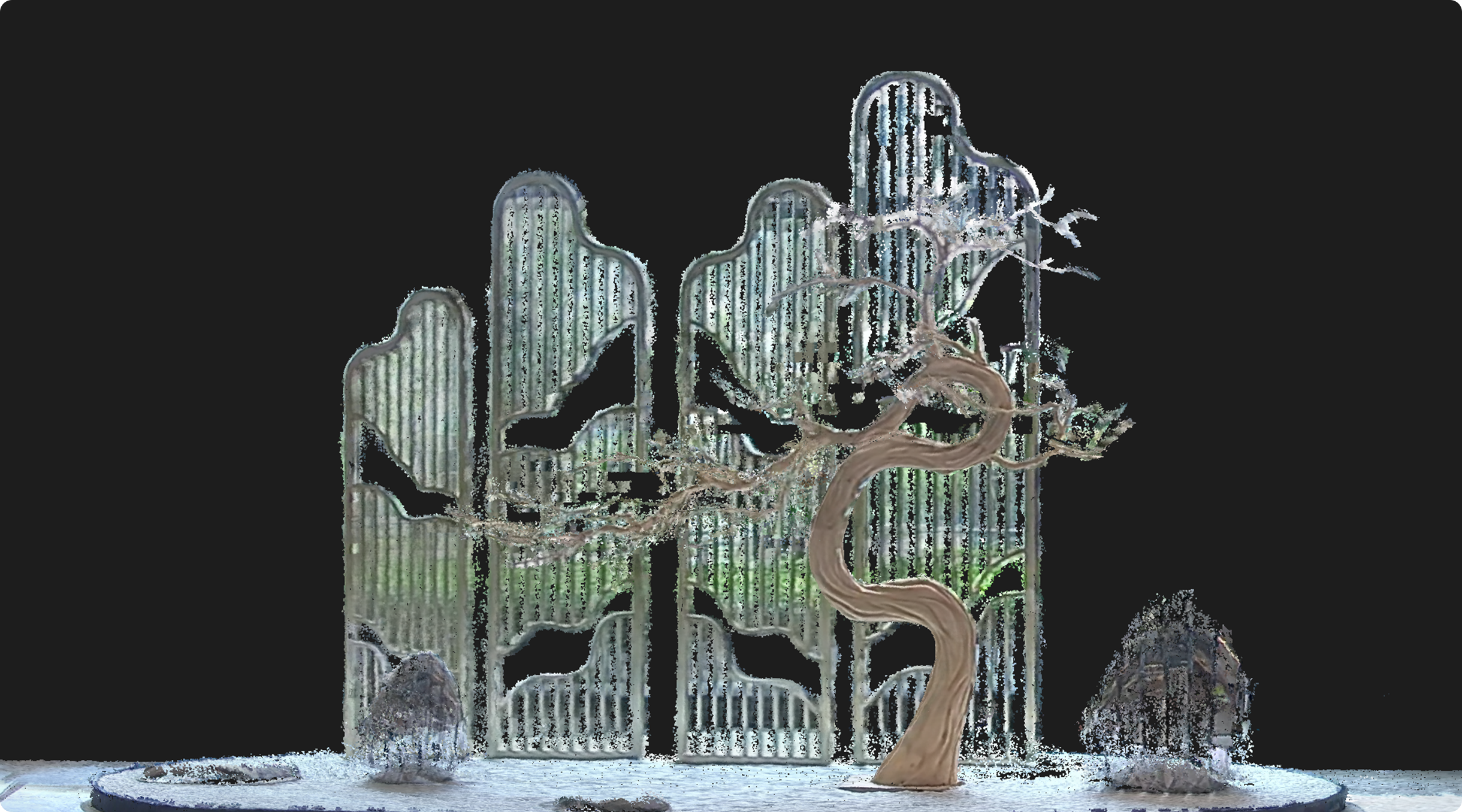
SLAM200E可基于全景影像实现大范围高斯泼溅数据生成、浏览和应用。高斯泼溅成果及过程数据均为通用格式,便于与其他应用平台对接。基于手持激光扫描仪的高斯泼溅功能终身免费使用。
静态站模式能有效消除手持扫描仪移动过程中所产生的误差,高效率获取挑战性场景的高精度、高精细、高密度三维点云数据;支持根据客户需求采集特定视角数据,并能对静态站数据进行自动拼接与优化,进一步提升数据质量与处理效率。
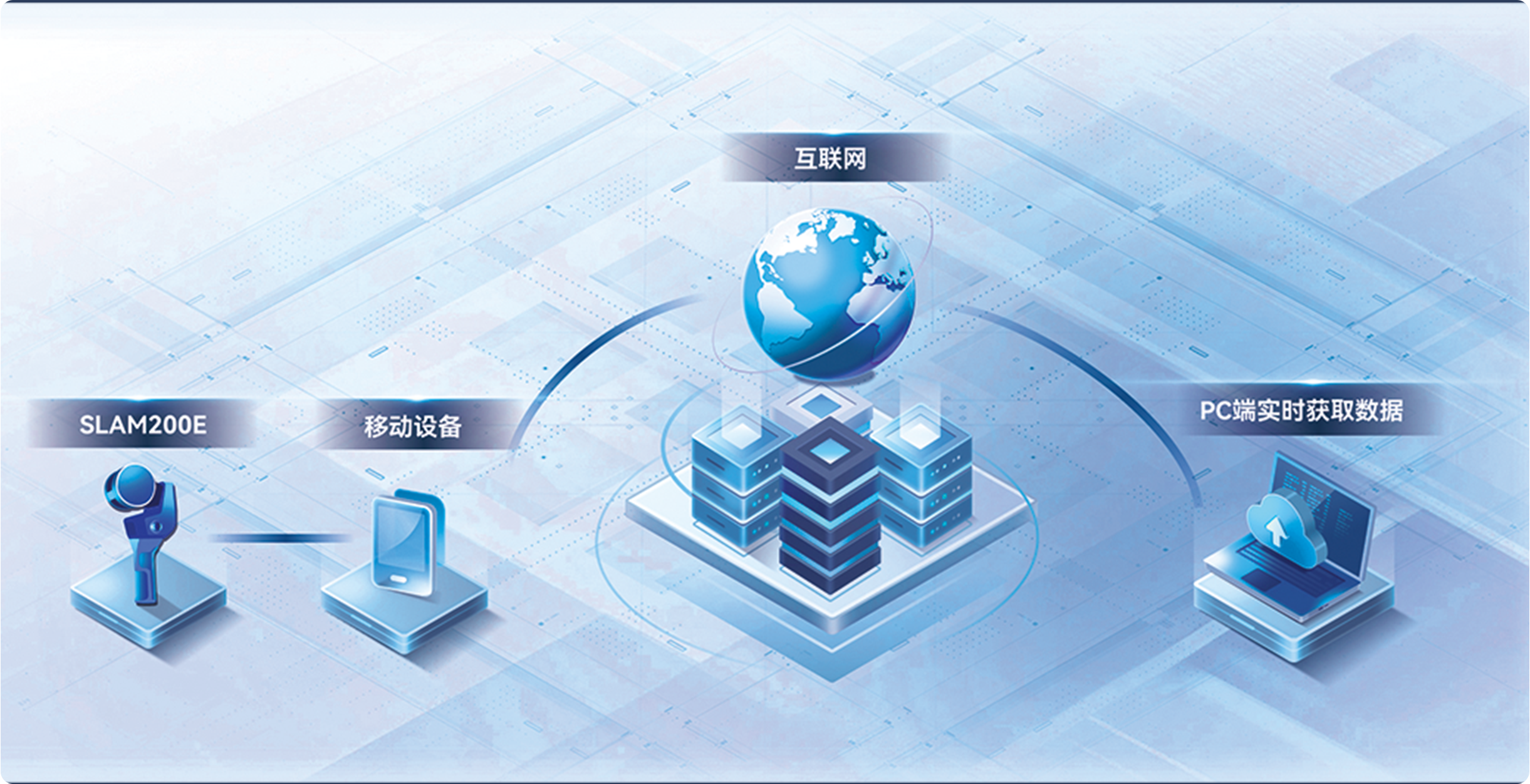
针对矿山作业、应急等应用场景,手持激光扫描仪在实时采集与建模过程中可通过局域网或互联网将建图成果实时远程传输至指挥大厅或控制中心,减少数据汇总的时间消耗,快速完成目标区域三维数据的获取,为决策响应争取宝贵时间。